Zelfbalancerende Kubus
Hoogwaardig mechatronisch systeem dat behoud van impulsmoment gebruikt voor nauwkeurige oriëntatie- regeling.
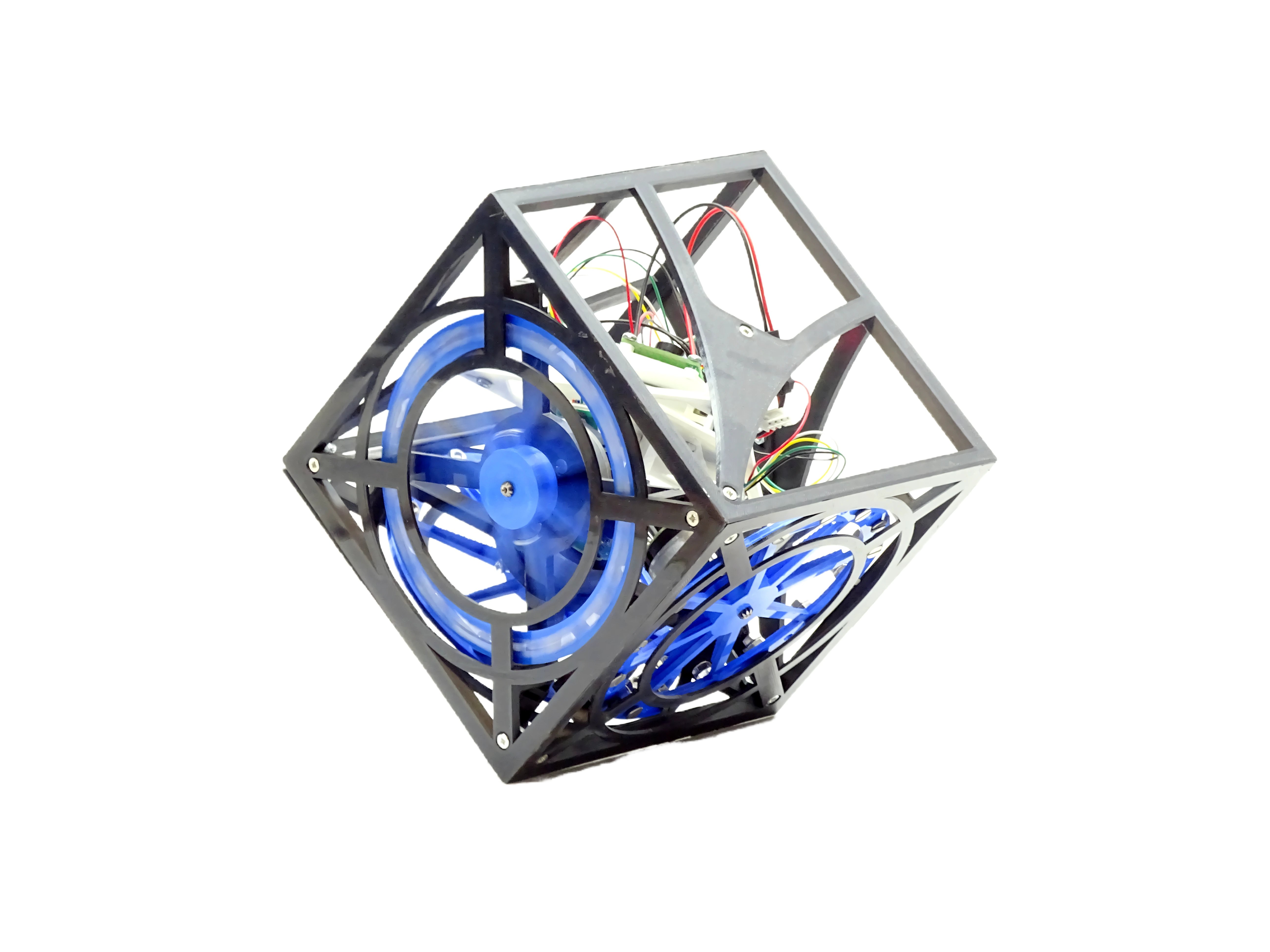
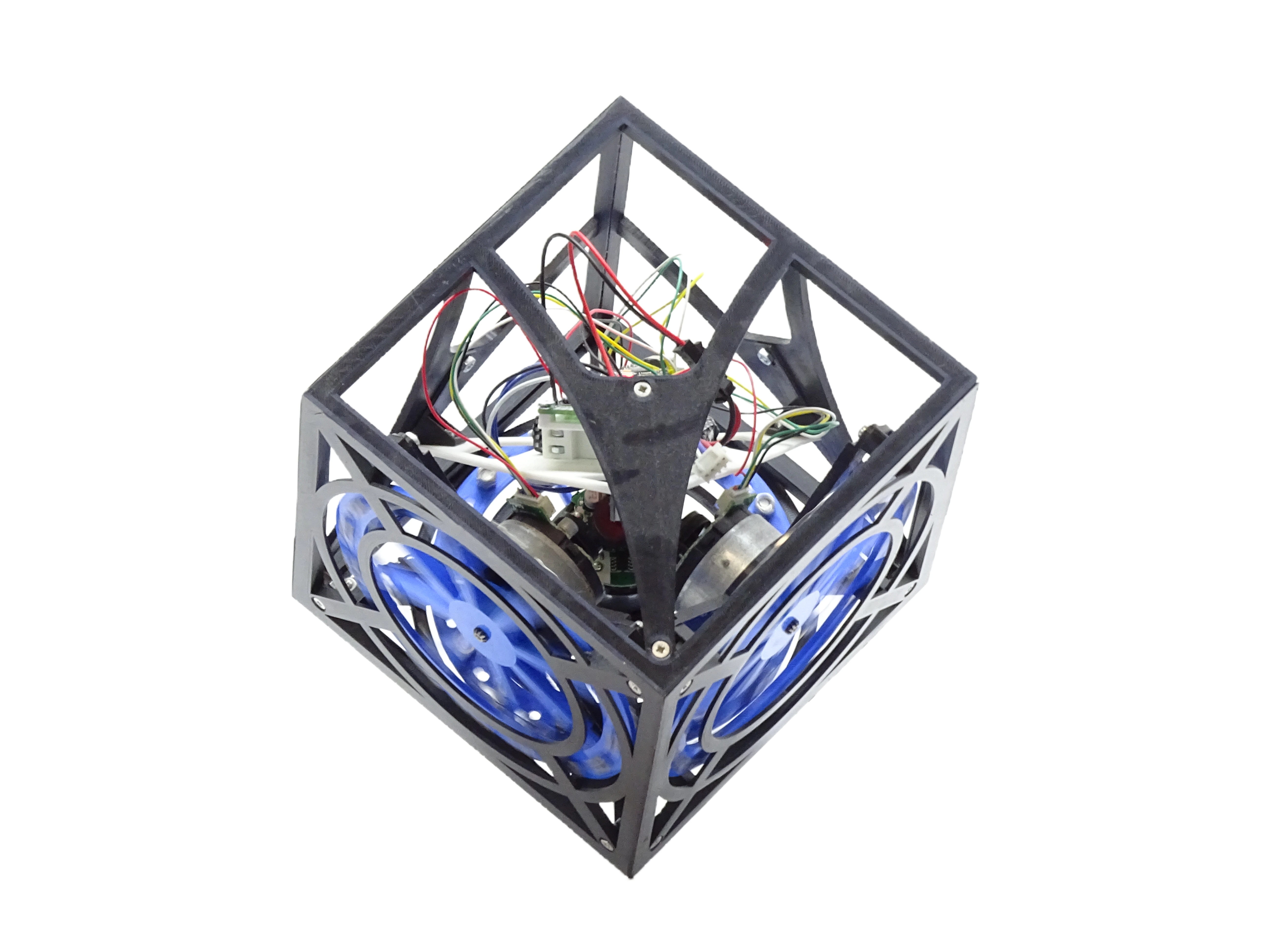
De Zelfbalancerende Kubus is een geavanceerde engineering-demonstratie die zijn balans behoudt op een rand of zelfs een enkele hoek. Dit wordt bereikt door het gebruik van snelle reactiewielen (vliegwielen) die corrigerende koppels genereren op basis van de fysische wet van behoud van impulsmoment.
De mechanische assemblage is ontworpen in SolidWorks met kritische focus op zwaartepunt- optimalisatie en structurele stijfheid om trillingen te minimaliseren. Het regelsysteem maakt gebruik van custom firmware geschreven in C++, die snelle oriëntatiedata van een IMU (Inertial Measurement Unit) verwerkt om nauwkeurige brushless motorcommando's uit te voeren via een afgestemde closed-loop regelaar.
Dit project is een geavanceerde showcase van dynamische stabilisatie, embedded realtime besturing en low-level mechatronische integratie, en bewijst het vermogen om complexe fysica-gedreven hardware-uitdagingen aan te pakken.

Mechatronische uitdagingen?
Van dynamische stabilisatie tot snelle motorsturing, ik bouw systemen die fysieke krachten beheersen.
Neem contact op