Self-Balancing Cube
High-performance mechatronic system utilizing conservation of angular momentum for precise orientation control.
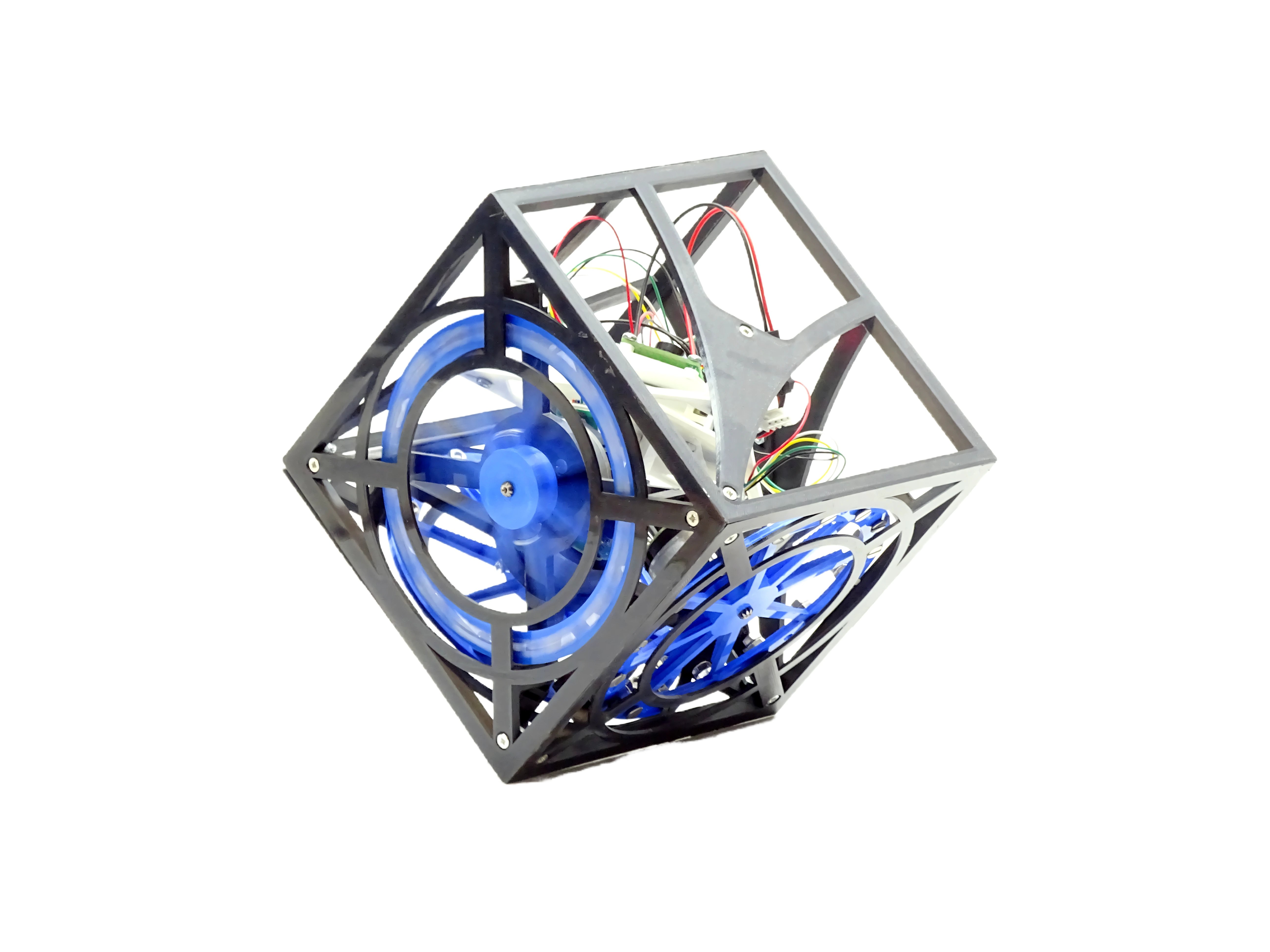
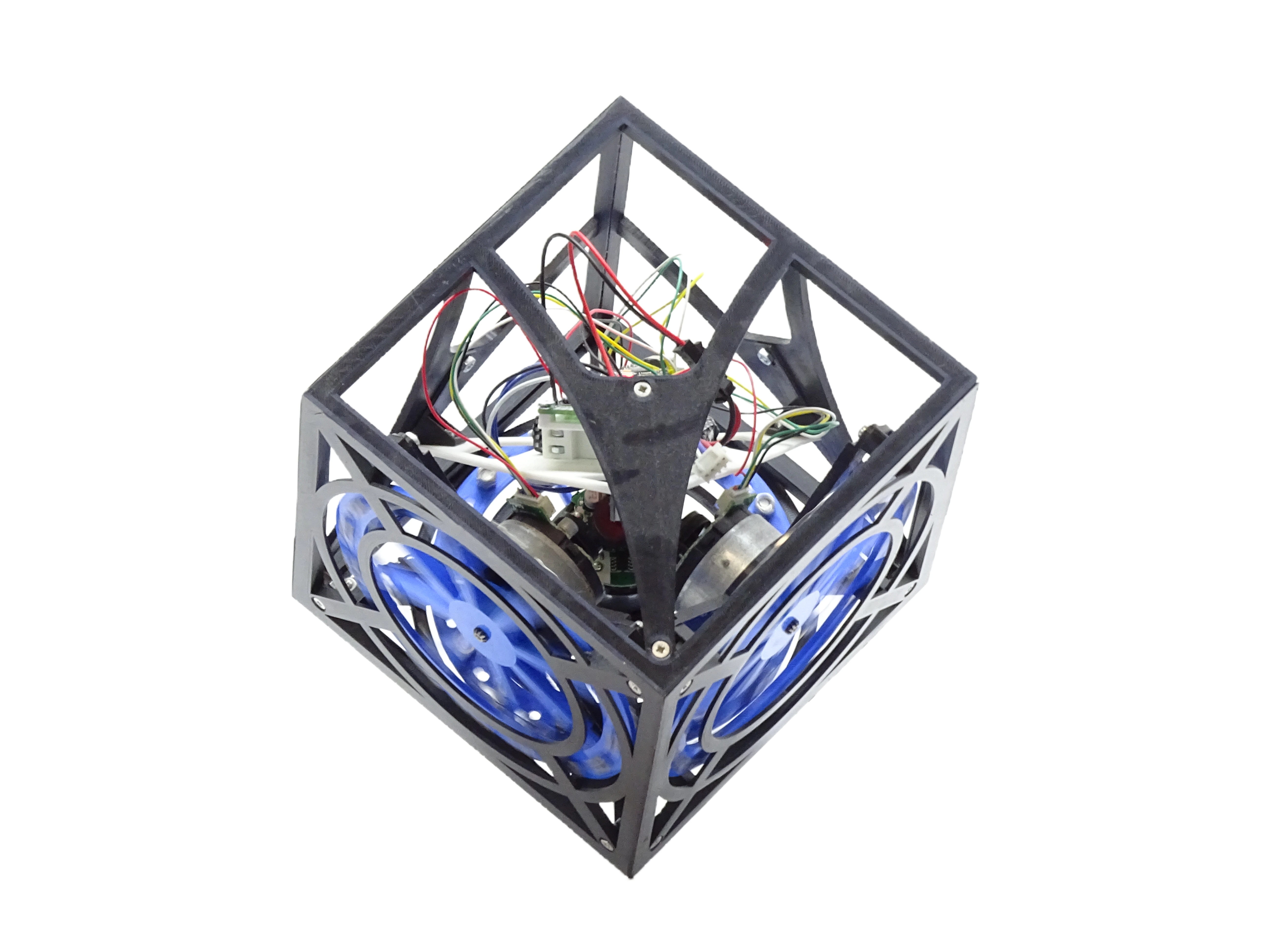
The Self-Balancing Cube is a sophisticated engineering demonstration that maintains its balance on an edge or even a single corner. This is achieved through the use of high-speed reaction wheels (flywheels) that generate corrective torques based on the physical law of conservation of angular momentum.
The mechanical assembly was engineered in SolidWorks with a critical focus on center-of-gravity optimization and structural rigidity to minimize vibration. The control system utilizes custom firmware written in C++, which processes high-speed orientation data from an IMU (Inertial Measurement Unit) to execute precise brushless motor commands via a tuned closed-loop controller.
This project is an advanced showcase of dynamic stabilization, embedded real-time control, and low-level mechatronic integration, proving the ability to handle complex physics-driven hardware challenges.

Mechatronic challenges?
From dynamic stabilization to high-speed motion control, I build systems that master physical forces.
Get in touch